Extended Localization System
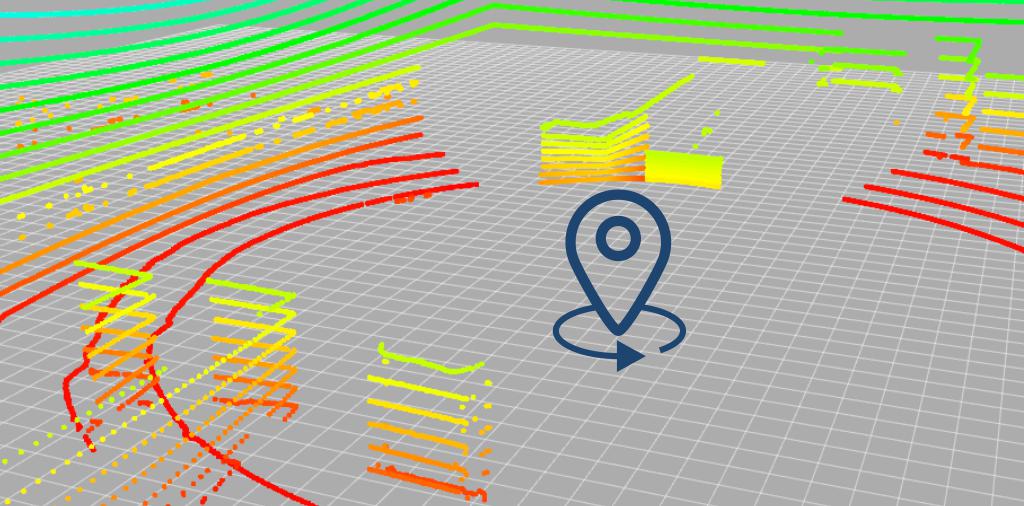
Das E.L.S. (Extended Localization System) dient zur Lokalisierung von Fahrzeugen anhand der Umgebung ohne künstliche Marken.
Extended Localization System
Die Basis bildet ein industrietauglicher PC (1). Neben der Fahrzeugodometrie (2) können Sicherheitslaserscanner (3) oder dedizierte 2D- oder 3D-Lidar (z. B. Velodyne VLP-16) (4) verwendet werden. Zur Kartenerstellung wird das Fahrzeug lediglich manuell durch die Umgebung geführt. Anhand dieser Umgebungskarte kann anschließend die eigene Position bestimmt werden. Das Verfahren ist tolerant gegenüber Änderungen der Umgebung. E.L.S. wurde bereits in zahlreichen in- und outdoor-Anwendungen erfolgreich eingesetzt.
Features
- automatische Lokalisierung mittels SLAM-Technologie (Simultaneous Localization and Mapping)
- keine künstlichen Marken erforderlich
- flexibles und wirtschaftliches Design
- in- und outdoor-tauglich
- einfache Kartenerstellung mit grafischer Oberfläche
- schnelle Inbetriebnahme
- zusätzliche Applikationen erhältlich, z. B. relative Positionierung, Fusionsmodule (Kamera, GNSS, Gyro), Pfadplanung
- Schnittstellen zu weiteren Götting-Komponenten (z. B. Regler)
- Condition Monitoring
- ROS-ready
Technische Daten
- Genauigkeit bis zu ±20 mm
- flächen- oder linienbewegliche Fahrzeuge
- max. 4 m/s
- Datenausgabe bis zu 30 Hz
- Treiber für verschiedene Lidar-Scanner
- CAN und Ethernet
Hardware
- Industrie-PC
- Nennspannung 24 VDC ±25 %
- Leistungsaufnahme typ. 15 W
- Einsatztemperatur -20° C bis +55° C
- lüfterloser Betrieb
- Abmessungen 340 mm x 115 mm x 198 mm plus Montage
- Schutzart IP 20
Anwendungsbeispiele
Toolchain
- Umgebungsanalyse

- Simulation

- grafische Benutzeroberfläche

- Multisensorfusion
- unabhängige Odometrieberechnung
- Diagnose
- Nutzung verschiedener Filter
Kontaktieren Sie Herrn Dr.-Ing. Sebastian Behling:





 Kontakt
Kontakt