

GNSS Positionier-System / Container Tracking / RTG Autosteering
Positionierung von Kranen unter Einsatz von RTK DGNSS mit Control Unit HG G-61430YD
Überblick
- RTG Positionierung/Autosteering oder Container Tracking mit Global Navigation Satellite Systems (GNSS)
- RTK DGNSS nach dem Stand der Technik
- Positionsgenauigkeit besser als ±2 cm mit 20 Hz Updaterate
- Richtungsgenauigkeit ~ 0.1° mit 2 m Baseline und 20 Hz
- Bis zu 255 Blöcke für Autosteering / Container Tracking
- Benutzerfreundliches und komfortables Web Interface über Ethernet
- alle Web Browser werden unterstützt
- alle Betriebssysteme
- Nutzung aus der Ferne möglich
- Schnittstellen zu SPS/Fahrzeugsteuerung
- CAN Schnittstelle
- Ethernet Schnittstelle
- RS 232 Schnittstelle (optional)
- PROFINET Schnittstelle (optional über das Erweiterungsmodul HG G-61432ZA)
Grundlegende Funktion
Das System nutzt RTK DGNSS um eine hochgenaue Position zu berechnen (GNSS = Global Navigation Satellite System, e.g. GPS). DGNSS steht für differentielles GNSS und bedeutet, dass eine Referenzstation ihre bekannte Position nutzt, um die aktuelle Abweichung des GNSS Signals zu berechnen. Dieser Korrekturwert wird dann per Funk an alle Rover (üblicherweise RTG) übertragen.
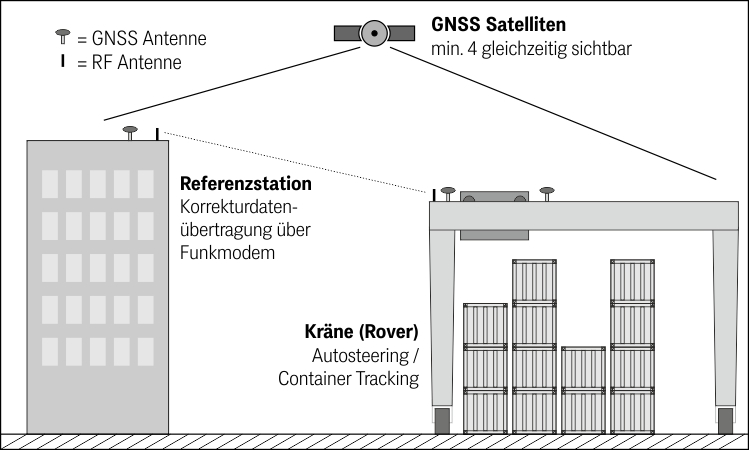
Differentielles GNSS (DGNSS) mit Referenzstation und mobilen Rovern (Kränen)
Um die Genauigkeit der Position noch weiter zu verbessern wird Real Time Kinematic (RTK) angewendet. Hierbei wird die Trägerphase des Satellitensignals ausgewertet (das System benötigt ca. 60 Sekunden nach einem Kaltstart, um Mehrdeutigkeiten auszuschließen). RTK DGNSS ergibt eine Genauigkeit von ungefähr ±2 cm, was genau genug ist für Container Tracking und RTG Autosteering.
Container Tracking
Durch den Einsatz des Systems können RTGs ihre aktuelle Position bestimmen, wenn sie einen Container aufnehmen oder absetzen. Das übergeordnete Container Management System kann dann die Position prüfen und abspeichern. Dadurch wird dokumentiert, wo sich individuelle Container befinden.
RTG Autosteering
Dank der hohen Genauigkeit des Systems ist es möglich, die Bewegungen eines Fahrzeugs zu verfolgen. Indem die Position permanent verfolgt wird lassen sich die Ausrichtung des Fahrzeugs und seine Geschwindigkeit berechnen. Zusätzlich sind die geografischen Positionsdaten der Anlage bekannt. Unter Einsatz dieser Funktionen lässt sich ein RTG automatisch entlang einer vordefinierten Route im Container Depot steuern. So lassen sich RTGs nicht nur individuell bewegen sondern zusätzlich quasi wie schienengeführte Fahrzeuge.
Ein besonderer Vorteil des Systems ist, dass für beide Funktionen keinerlei Installationen in der Fahrbahnoberfläche des Container Depots nötig sind.
Downloads
| Datei | Dateigröße | Hochgeladen |
|---|---|---|
| 237.9 KB | 05.05.2021 | |
| 5.98 MB | 05.05.2021 | |
| 2.81 KB | 15.04.2024 | |
| 9.35 MB | 31.03.2021 |