

Bahnführungsrechner
Der Bahnführungsrechner dient zur Führung von Fahrerlosen Transportfahrzeugen (FTF) nach virtuellen Leitspuren. Er hat folgende Aufgaben:
- Bestimmung der aktuellen Position über Transponder, GPS oder externe Vorgabe.
- Rekonstruktion der zu fahrenden Strecke (anhand von Segmentdateien).
- Spurführung / Bahnführung (Fahrzeug auf Spur regeln).

Beispielfahrzeuge
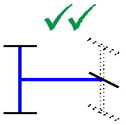
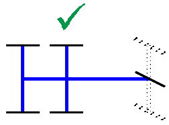
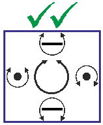
Geeignete und ungeeignete Fahrzeugtypen
Geeignet sind alle Fahrzeuge, die sich reproduzierbar und voraussagbar verhalten. Mehrere nicht gelenkte Achsen, Auflieger oder Knicklenker sind nicht geeignet. Die Räder sollten wenig schlupfen und möglichst hart sein.
 |
 |
 |
 |
|
|
|
|
Geeignete Fahrzeugtypen
Schnittstellen |
|||
|---|---|---|---|
| Bez. | Funktion | Bez. | Funktion |
| ETH | RJ 45, Ethernet | SIO 3 | RS 232, nicht verwendet |
| USB | USB 1.1, Typ A (Logging auf Stick) & Typ B (Firmware Update) nicht gleichzeitig nutzbar |
IO | 3x Eingänge Schaltschwelle 0 – 24 V, Transponder-Antennen 1x Ausgang 0 – +Ub, Nothalt |
| SIO 1 | RS 232, Kommunikation mit internem GPS Empfänger (optional) | ENCODER 1/2 |
Schaltschwelle 0 – 24 V, Anschluss der Inkrementalgeber |
| SIO 2 | RS 232, Konfiguration der Ethernet Schnittstelle | PROG | Nur für den internen Gebrauch |
| CAN 1 | CAN Bus 1, CAN Spez. V2.0 Teil B, Anschluss Götting Geräte (z. B. Gyro) | ANT 1/2 | Mit Option GPS: 2 x TNC für GPS Antennen Sonst Blindstopfen |
| CAN 2 | CAN Bus 2, CAN Spez. V2.0 Teil B, Anschluss Götting Geräte (z. B. Gyro) | Feldbus-Modul | Optionale Erweiterungen Profinet (HG G-61431ZA) / Profibus (HG G-61431YA) |
Schnittstellen des Bahnführungsrechners
Positionsbestimmung mit Sensorfusion
Die Positionsbestimmung erfolgt über eine interne Sensorfusion von Transpondern und/oder GPS sowie einer Odometrie. Alternativ wird die Position von außen zur Verfügung gestellt (z. B. Laserscanner HG G-43600). Die Odometrie lässt sich durch den Gyro HG G-84300 verbessern.
Die Sensorfusion berechnet die Position und die Ausrichtung des Fahrzeugs. Sie liefert dem Bahnführungsrechner einen Datensatz mit folgendem Inhalt (der sogen. Pose):
X-Position / Y-Position / Geschwindigkeit / Fahrzeugausrichtung
Bahnführung nach virtuellen Spuren
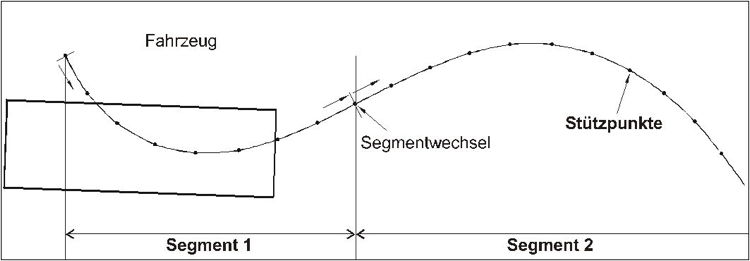
Skizze: Kursgestaltung mit Segmenten und Stützpunkten
Der Bahnführungsrechner benötigt Informationen zur Fahrzeug-Geometrie sowie eine Segmentdatei. Segmente beschreiben Abschnitte des Kurses. Sie orientieren sich nicht an real vorhandenen Spuren sondern werden über ein Plug-In der Götting KG in dem CAD Programm Malz++Kassner CAD 6 virtuell definiert, sodass die Fahrzeugfähigkeiten bestmöglich auf die Anlage abgebildet werden. Jedes Segment besteht wiederum aus mindestens 4 Stützpunkten. Der Bahnführungsrechner errechnet aus den Positionen der Stützpunkte eine virtuelle Spur, der das definierte Fahrzeug folgen kann. Bestehende Kurse (segmente.csv, siehe Beispiel in den Downloads unten) lassen sich komfortabel online im Götting Track Editor bearbeiten.

Für jeden Stützpunkt kann festgelegt werden, welche Geschwindigkeit das Fahrzeug fahren soll. Der Bahnführungsrechner interpoliert linear, sodass ein gleichmäßiges Geschwindigkeitsprofil entsteht. Darüber hinaus können für jeden Stützpunkt Attribute vorgegeben werden, die besondere Aktionen definieren, z. B.
- Tellerwende (drehen auf einem Punkt)
- Stopp Distanz (anhalten im Segment)
- Offsetfahren (um eine Fahrbahn durch die hochgenaue Automatikfahrt nicht nur an bestimmten Stellen zu beanspruchen kann mit Versätzen gearbeitet werden)
- Lenkung invertieren (Spezialfall, um flächenbeweglichen Fahrzeugen bei Bedarf die Lenkrichtung an bestimmten Stellen des Kurses vorzugeben)
- Umschalten des Positioniersystems auf bestimmten Strecken des Kurses (z. B. Transponder und GPS)
Downloads & Bilder
- Beispiel für eine virtuelle Spur mit Stützpunkten
- Beispiel Fahrzeugtypen
- Skizze: Geeignete Fahrzeugtypen