

Lehrte, 17.05.2023 – Ein automatisierter Elektrostapler transportiert seit Juni 2022 bei der Firma Ostendorf Kunststoffe GmbH Paletten. Die Funktion sehen Sie in folgendem Video, dann folgt eine detaillierte Beschreibung des Projekts, die Sie sich in den Downloads unten auch als PDF-Datei herunterladen können.
Video


Unsere Datenschutzerklaerung
Aufgabenstellung
Kartonierte Waren auf Standard EU-Paletten werden auf Rollen- und Kettenförderern vor den Produktionshallen bereitgestellt. Das AGV muss die Paletten zum Zwischenlager transportieren und auf die Fördertechnik zum Einlagern umsetzen.

Abbildung 2: Lastübergabe an Förderer mit Peilmarken
Umsetzung
Fahrzeug
Für die Transportaufgabe wurde ein Linde E20 Li-Ion Gabelstapler der Baureihe 387 ausgerüstet (siehe Video).
Auftragserstellung
Das AGV arbeitet ohne Leitsteuerung und erstellt sich Transportaufträge anhand den von der Fördertechnik gemeldeten bereitstehenden Paletten. Die Bearbeitung erfolgt selbsttätig ohne Benutzerinteraktion nach einer definierbaren Prioritätenliste.
Navigation
Der Transport erfolgt zwischen den Aufnahme- und Abgabepunkten auf vordefinierten Fahrwegen (Abbildung 3 linke Seite). Die Umgebungsnavigation wird über einen Laserscanner auf dem AGV realisiert (Abbildung 3 rechte Seite).
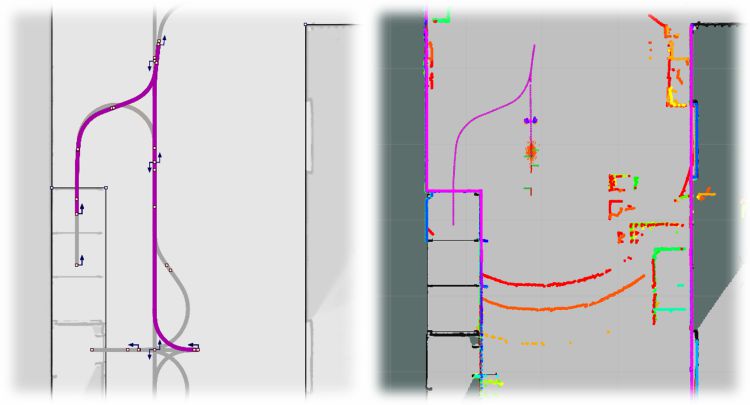
Abbildung 3: Abgleich zwischen Soll-Position (links) und Ist-Position (rechts)
Lasthandhabung
Für die positionsgenaue Aufnahme und Abgabe der Paletten „peilt“ das AGV mit den bodennahen Sicherheitslaserscannern auf Peilmarken an der Fördertechnik (Abbildung 2). Eine Überwachung auf die exakte Position der bereitstehenden Palette oder eine Überprüfung auf Vollständigkeit der Ladung wurde in diesem Projektumfang nicht umgesetzt. Der Bereich der Lastübergabe ist als Gefahrenbereich ausgezeichnet.
Die Hauptfahrrichtung in beladenem Zustand ist rückwärts, damit die Ladung im Fall einer Notbremsung nicht abgeworfen wird.
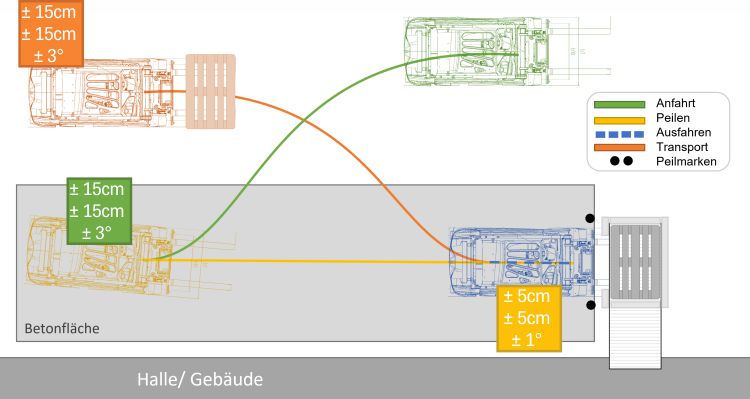
Abbildung 4: Ablauf einer Lastübergabe
Sicherheit
Ein umfangreiches Sicherheitskonzept, abgeleitet aus Risiko- und Gefahrenanalysen, sowie gängigen, geltenden Standards, garantiert einen personen- und sachschadenfreien Einsatz. Das Sicherheitskonzept richtet sich u. a. nach den im Datenblatt unten genannten Normen.
Sonstige Funktionen
Weitere Systemfunktionen runden den Einsatz des AGV ab und garantieren eine hohe Verfügbarkeit.
- Navigationsturm mit Laserscanner für die Umgebungsnavigation
- Sensorabgriffe für eine sichere Geschwindigkeits- und Lenkwinkelerfassung
- Sicherheitslaserscanner für die Personenerkennung
- Laserscanner am Dachaufbau für den Maschinenschutz
- Vier Not-Aus-Taster
- Signalampel am Dachaufbau für eine optische und akustische Signalausgabe
- WLAN-Kommunikation mit bestehender Fördersteuerungstechnik
- Verarbeitung und Bereitstellungen von Freigabe- und Sperrsignalen an die Fördertechnik
- Abstandhalter auf der Gabel mit Reflexlichttastern für die Paletten-Erkennung
- Sensoren für die Überwachung der Gabelhöhe und Neigung
- Automatisiertes Laden der Fahrzeugbatterie in einer Ladestation (modifizierter Dachaufbau)
- Bediendisplay in der Fahrerkabine
- Bedienfeld außen am AGV mit Leuchttastern
- Die Möglichkeit der manuellen Bedienbarkeit ist weiterhin gegeben
Ansprechpartner: Vertrieb FTS
Downloads
| Datei | Dateigröße | Hochgeladen |
|---|---|---|
| 150.18 KB | 17.05.2023 |
Über die Götting KG Stand: 04/2023
Die Götting KG , gegründet 1965, ist ein innovatives, weltweit tätiges Unternehmen mit Sitz in Lehrte bei Hannover. Sie entwickelt und produziert Funkdatenübertragungs-Systeme und Sensoren zur Spurführung von sogenannten Fahrerlosen Transportfahrzeugen (FTF). Nach eigener Einschätzung hat die Götting KG weltweit das umfangreichste Programm an diesen Komponenten für den Bereich FTF.
Weitere Schwerpunkte sind neben der Automatisierungs- und Fördertechnik die Verkehrstechnik, die HF-Meßtechnik, die allgemeine Funktechnik sowie kundenspezifische Entwicklungen für Automobilhersteller, Elektro- sowie die Rundfunkindustrie. Das Unternehmen beschäftigt ca. 90 Mitarbeiter. Davon sind rund 30 Ingenieure überwiegend in der Entwicklung tätig.
Zur Götting KG gehört die Abteilung FOX. FOX liefert Transportsysteme mit fahrerlosen Seriennutzfahrzeugen, insbesondere für den Außenbereich (LKW, Radlader, Industrieschlepper, Gabelstapler, u.ä.). Die umgerüsteten Fahrzeuge lassen sich sowohl manuell als auch automatisch nutzen. Für die Automatisierung der weltweit ersten fahrerlosen Lkw hat FOX mehrere erste Preise erhalten.